
© the UNEXMIN Consortium
On the 31st of January and 1st of February, the UNEXMIN consortium partners and advisory board members gathered in Bled, Slovenia, to discuss the current and future developments of this EU-funded project. They discussed the work carried out by each partner in the previous months, but mainly focussed on the robot’s assembly, due in April, in Porto, Portugal, and the first pilot trials, to be held in the Kaatiala mine, in Finland, in June.
On the first day of the meeting, detailed information was given regarding the advances in each of the eight Work Packages that are concerned with the UNEXMIN technology development – hardware and software – and with its exploitation. The remaining of the first day, as well as the second day, were dedicated to discussions and preparations regarding the UX-1 robot assembly; the first field trials in the Kaatiala pegmatite mine and future exploitation measures for the UNEXMIN technology.
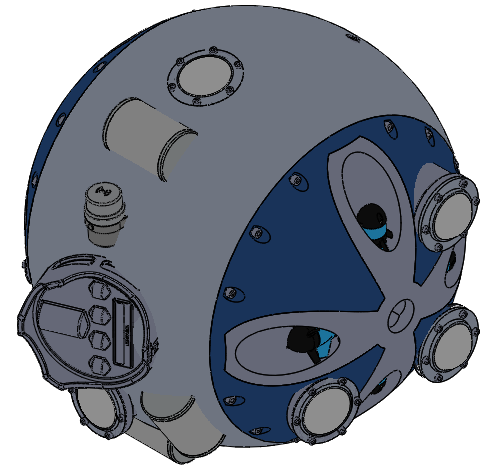
- The assembly of the robotic explorer is planned for April, in Porto, Portugal. All the technical teams, which include hardware and software developers, will come together to finish the first fully-operable UX-1 robot prototype. Further testing, mainly focusing on software, will take place in INESC TEC’s test pool, in order to prepare UX-1 for the field trials.
- In June, Kaatiala will receive the UNEXMIN partners for the first field test, from a planned total of four. Here, the UX-1 robot will be deployed for the first time in a real mine environment. It is expected that the robot will be able to perform basic tasks related to movement, control and autonomy, essential for its future exploration and mapping missions.
- Exploitation measures for the future of the UNEXMIN technology are already being discussed among the project partners. It is essential to have a clear vision of the future of the technology well in advance, to be better prepared for upcoming market challenges, like different mine layouts, geometry and depth.
The UNEXMIN technical teams are currently finishing the hardware and software elements of the robotic system: including sensors, pressure hull and, on-board and post-processing software tools in time for the assembly and real environment test phases. Further development of the components will follow the first trial.
Correspondent: Luis Lopes